
2023 End-Of-Year Newsletter
Our offseason is coming to a close, so we want to share what the team has been working on over the past couple months. We used the fall a bit differently this year to spend time making a small offseason robot. In an effort to test out a swerve drive, a new type of drivetrain, we designed a mini robot based off the 2017 FRC Season that is capable of zipping across the floor and shooting wiffle balls! We just finished the robot this week, and we’re super happy that so many new students could help out and learn skills along the way.
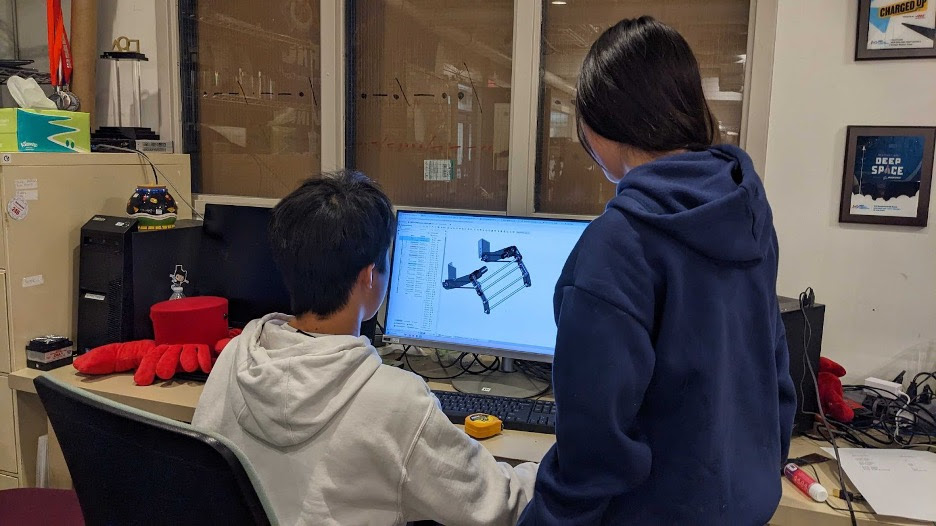
Teddy '27 and Sharon '27 working together on the CAD for our offseason robot’s intake.

Coco '26, Yaseen '24, and Luke '25 working to rivet the hopper to our offseason robot.
The build process involved many steps, including brainstorming, CADing (Computer-Aided Design), prototyping (to test and modulate our designs), machining, assembling, and finally implementing electrics and programming. It was really helpful to go through this process with our new members, as it’s the same way we will design and build our competition robot in 2024.
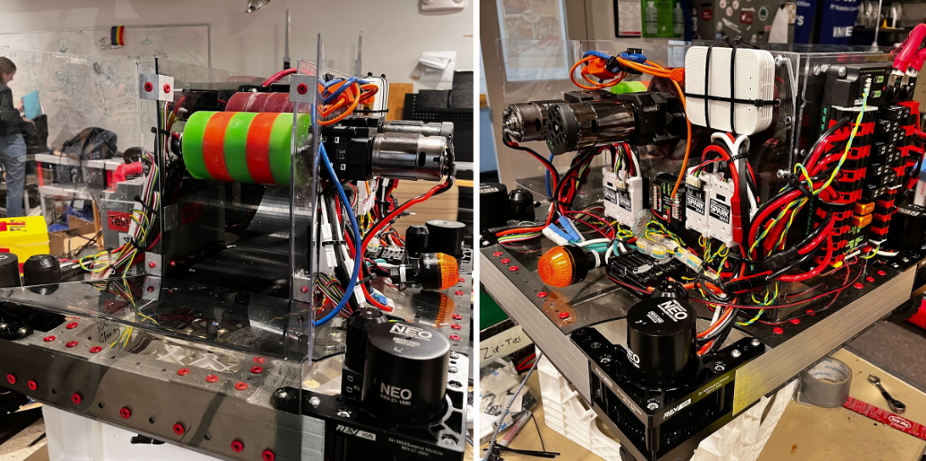
Pictures of our finished robot! On the left is the shooter and ramp, which takes in balls from below and spins them along the wheel and ramp to shoot them forward at a high angle. On the right is a picture from the back side, featuring the electrical work we managed to fit on the small bot. At each of the corners you can see two motors (one large and one small) which work to power each of the drivetrain’s wheels independently. One motor moves the wheel conventionally, while the other rotates the wheel like the front wheels of a shopping cart, making it a “swerve” drive.
The team is looking forward to bringing our robots to a local FIRST Lego League Championship this Saturday hosted by our friends the LigerBots (FRC 2877). We plan to display our work and help out with various STEAM activities they have planned.
We also recently received an invitation to display our team and robots at The Society for Laboratory Automation and Screening Conference in February. This is a really unique opportunity for the team to attend one of the largest international STEM conferences. We can’t wait to go!
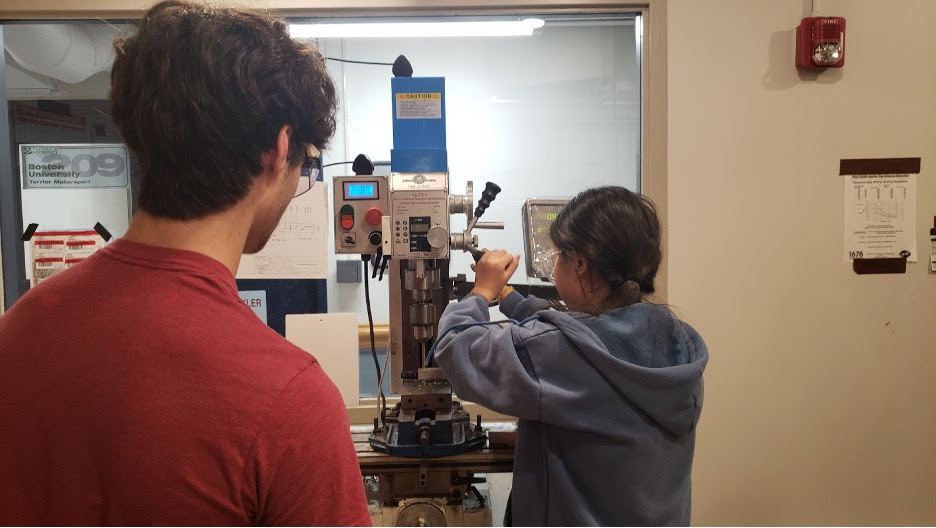
Owen '25 teaching Sharon '27 how to use the mill which drills holes with precise measurements into our aluminum.
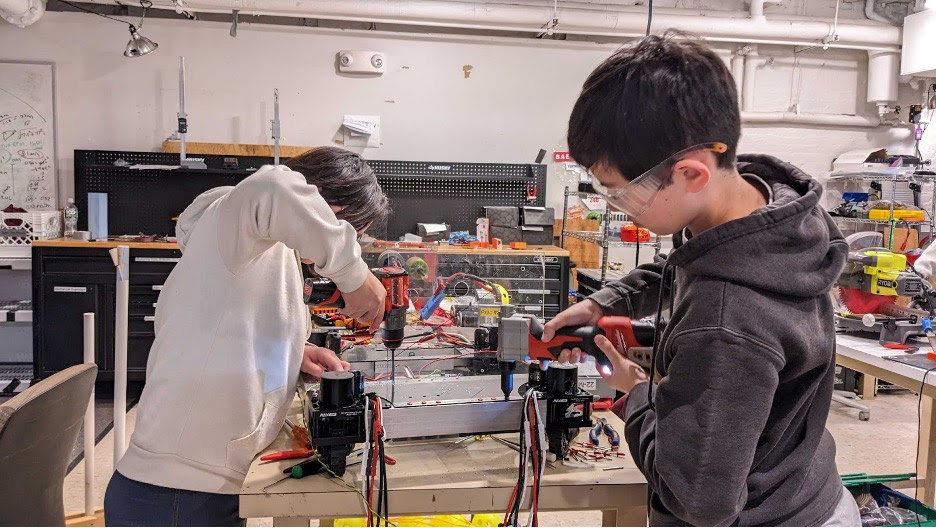
Kendree '25 and Sebastian '27 riveting the bottom plates onto the drivetrain of our offseason robot.
Finally, we want to thank you all so much for your support! We couldn’t have hoped for more from the crowdfunding campaign this fall, and your generosity is what allows us to make projects like our new offseason robot possible.
If you haven’t had a chance to give, there’s still time before the end of the year to make donations: https://lobstahbots.com/support (or below). If you want to get involved or have any questions, you can email us at lobstahbots@gmail.com and we would be happy to respond!
Sincerely,
The Lobstah Bots