
FIRST dive into the REEFSCAPE!
On Saturday, January 4th, over 30 Lobstahs gathered to watch the reveal of this year’s FIRST Robotics Competition (FRC) game, REEFSCAPE℠. This year, robots will compete by placing ”coral” pipes and removing “algae” exercise balls from a metal pole “reef” structure. Watch a quick game summary here.
The Lobstahs had multiple activities to help get the brain juices flowing, including archetype naming, goal setting, and an ideas pitch. Ranging between “Doesn’t Move Darryl” and “Worlds Winner William,” archetype naming helped the team understand various game strategies by thinking about the types of robots we might see on the field. When combined with a point analysis, we understood the strongest strategies in the game as well as the objectives we should prioritize. With our options defined, we settled on four guiding goals to narrow our potential robotic architecture: quality of our robot, qualifying for the World Championship, “enjoyment, engagement, education,” and having a fully built robot by Week Zero (an unofficial practice event which takes place on February 15).
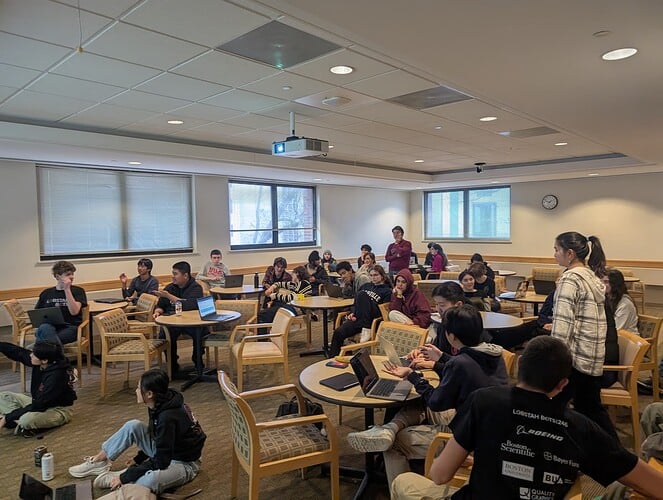
Students reading and discussing this year’s game manual
After our brainstorming session, we moved onto to our idea pitch. Each student, including the new members, had a couple minutes to explain and defend a robot archetype they came up with. Everyone used a combination of paper drawings and improvised props, and by the end, was far more familiar with the game.

Luke Chang ‘25 presenting robot ideas to the whole team
After the discussion at Kickoff, we began to build prototypes to gather data and inform our design decisions. So far, we have built multiple iterations on a claw intake prototype, an over-the-bumper intake, a station style intake ramp, and a passive alignment mechanism.
When thinking about robot design, there are many options! To inform our choices, our CAD (Computer-Aided Design) team has been hard at work using KrayonCAD to make mock-ups of robot layouts. KrayonCAD is a form of 3D modeling with low detail but enough specifics to see how a robot would work.

Alex Nowosielski ‘26, Arden Nasveschuk ‘26, Angel Dong ‘26, and Kelsey Liu ‘26 taking apart our beloved 2024 robot Woodpecker
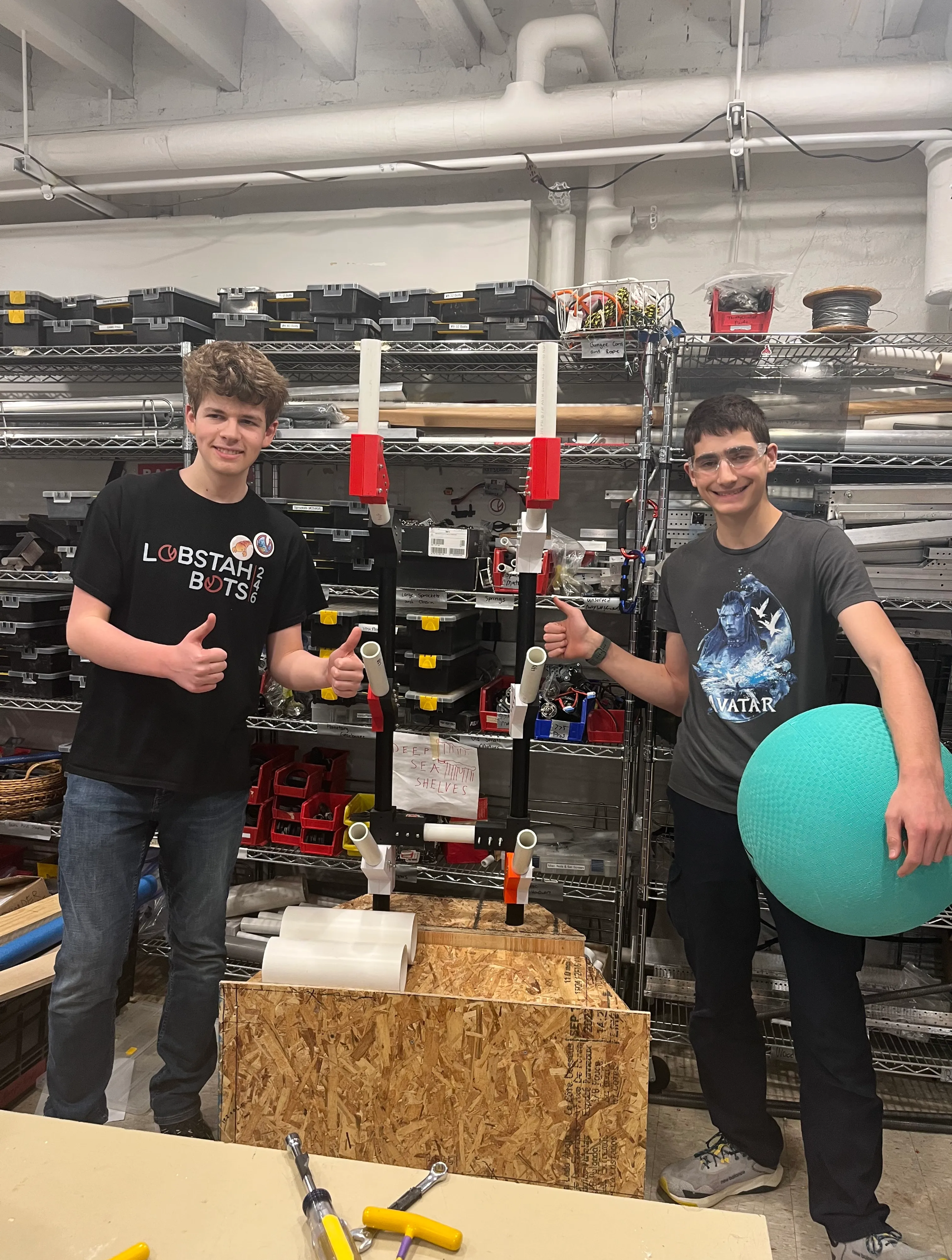
Nate Magoun ‘27 and Daniel David ‘27 showing off our completed reef
The mechanical subteam has built field elements for testing our robots in the lab space. We have finished the three important field elements: the coral station, the reef, and the processor. The first one is used by the human player to feed game peices onto the field, and both of the latter are for scoring game pieces. During this process, new students learned and practiced using machines in the shop.

Kendree Chen ‘25 leads the team in a discussion of different robot archetypes
After doing a lot of designing, prototyping, brainstorming, and discussing, we are happy to share that we have landed on a final robot design, which we will soon begin fabricating. Our robot will have a large elevator (a mechanism that can move up and down), and there will be a pivot (a mechanism that can rotate) on the elevator. On the pivot, there will be a claw capable of holding both game pieces. In addition, there will be a ramp to intake and deliver game pieces from a feeder station to the claw.
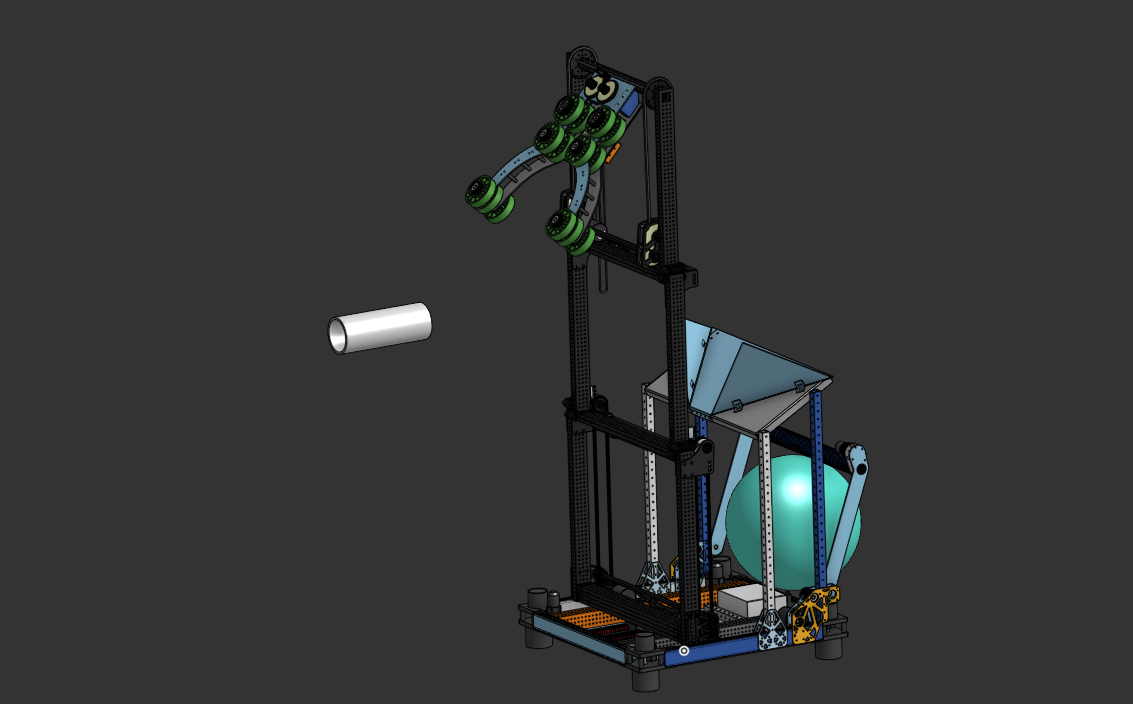
Our current robot CAD
Thank you for all your contributions! If you want to be more involved or have any questions, you can email us at lobstahbots@gmail.com and we would be happy to respond!
Sincerely,
The Lobstah Bots